# Assign a value to a variable and print it
x = 3.14
print("The value of x is", x)The value of x is 3.14Useful Python Commands for Differential Equations
This page is a quick-reference guide to Python tools used throughout this course. It is not a complete Python tutorial. Students who want a deeper introduction may find the following resources helpful:
Python (Python Software Foundation 2024) can be installed and managed in several ways. Below we describe two popular approaches: uv (a modern, fast tool) and conda (a traditional choice popular in scientific computing). Either approach works fine for this course.
uv (Recommended for New Users)uv is a fast, modern Python package and project manager written in Rust. It can install Python itself, create isolated project environments, and manage packages — all in one tool.
Installing uv:
On macOS and Linux (run in your terminal):
curl -LsSf https://astral.sh/uv/install.sh | shOn Windows (run in PowerShell):
powershell -ExecutionPolicy ByPass -c "irm https://astral.sh/uv/install.ps1 | iex"Installing Python with uv:
uv python install 3.14 # installs Python 3.14Creating a virtual environment and installing packages:
A virtual environment is an isolated folder that holds a specific Python version and a set of packages for a project. This keeps your projects from interfering with each other.
# Create a new project folder and enter it
mkdir my_diffeq_project
cd my_diffeq_project
# Create a virtual environment using a specific Python version
uv venv --python 3.14
# Activate the environment
# On macOS/Linux:
source .venv/bin/activate
# On Windows:
.venv\Scripts\activate
# Install packages needed for this course
uv pip install numpy scipy sympy matplotlib
# Deactivate when you're done working
deactivateRegistering the environment as a Jupyter kernel (so it appears in VS Code or JupyterLab):
uv pip install ipykernel
python -m ipykernel install --user --name diffeq_py --display-name "DiffEq Python"For full documentation see https://docs.astral.sh/uv/.
conda / AnacondaConda is a package and environment manager that is widely used in scientific computing. Anaconda is a full distribution that bundles Python, conda, and hundreds of scientific packages. Miniconda is a lighter-weight installer that includes only Python and conda itself.
Installing conda:
Download and run the installer for your operating system from one of the following:
Creating a conda environment:
# Create a new environment named "diffeq" with Python 3.14
conda create -n diffeq python=3.14
# Activate the environment
conda activate diffeq
# Install the packages needed for this course
conda install numpy scipy sympy matplotlib
# Install Jupyter support
conda install ipykernel jupyter
# Register the environment as a Jupyter kernel
python -m ipykernel install --user --name diffeq_py --display-name "DiffEq Python"
# Deactivate when done
conda deactivateUseful conda commands:
conda env list # list all environments
conda list # list packages in the active environment
conda install <package> # install a package
conda remove <package> # remove a package
conda update <package> # update a package
conda remove -n diffeq --all # delete the environment entirelyFor full documentation see https://docs.conda.io/.
You can write and run Python code in several ways:
| Interface | Description |
|---|---|
| VS Code | Full-featured editor; excellent Jupyter notebook support via extension |
| JupyterLab | Browser-based environment for notebooks |
| Spyder | MATLAB-like IDE popular with scientists and engineers |
Terminal / python REPL |
Lightweight; good for quick tests |
For this course, VS Code or JupyterLab are recommended. Both work seamlessly with Quarto and Jupyter kernels.
Python is a general-purpose, high-level programming language known for its clean, readable syntax. It is one of the most widely used languages in scientific computing, data analysis, machine learning, and engineering.
Key characteristics:
A minimal Python example:
# Assign a value to a variable and print it
x = 3.14
print("The value of x is", x)The value of x is 3.14Python supports the standard arithmetic operators +, -, *, /, ** (exponentiation), and // (integer division):
a = 10
b = 3
print(a + b) # addition: 13
print(a - b) # subtraction: 7
print(a * b) # multiplication: 30
print(a / b) # division: 3.333...
print(a ** b) # exponentiation: 1000
print(a // b) # integer division: 3
print(a % b) # remainder: 113
7
30
3.3333333333333335
1000
3
1Python’s power comes largely from its ecosystem of modules (also called libraries or packages). A module is a file (or collection of files) containing Python code (e.g., functions, classes, and constants) that extends what plain Python can do.
For example, plain Python does not have a function to compute \(\sin(x)\). But the math module (part of Python’s standard library) does:
import math
print(math.sin(math.pi / 2)) # 1.01.0For this course we rely on four major third-party packages:
| Package | Purpose | Documentation |
|---|---|---|
| NumPy | Fast arrays and numerical math | numpy.org |
| SciPy | Scientific algorithms (ODE solvers, linear algebra, …) | scipy.org |
| SymPy | Symbolic (exact) mathematics | sympy.org |
| Matplotlib | 2-D and 3-D plotting | matplotlib.org |
To use a module you must first import it. Importing makes the module’s contents available in your current session.
Method 1 — import the whole module:
import math
print(math.sqrt(16)) # 4.04.0The prefix math. is the module’s namespace — it tells Python where to find sqrt. Using namespaces prevents name conflicts: if two modules both define a function called array, you can still use both as numpy.array and someother.array.
Method 2 — import with an alias (most common in scientific Python):
import numpy as np # conventional alias for NumPy
import sympy as sym # conventional alias for SymPy
x = np.array([1, 2, 3])
print(x)
y = sym.Symbol('y')
print(y)[1 2 3]
yUsing standard aliases (np, sym, sp, plt) makes code more concise and matches what you will see in textbooks and online documentation.
Method 3 — import specific names:
from math import sqrt, pi
print(sqrt(2)) # no "math." prefix needed
print(pi)1.4142135623730951
3.141592653589793Avoid from numpy import *. This imports everything into your namespace, which can silently overwrite built-in Python names and makes code harder to read and debug.
Functions let you package a block of code under a name so you can reuse it without copying and pasting. In Python, functions are defined with the def keyword.
def square(x):
"""Return the square of x."""
return x ** 2
print(square(5)) # 25
print(square(2.5)) # 6.2525
6.25The string immediately inside the function (in triple quotes) is called a docstring. It documents what the function does and is a good habit to include. Note: Indentation matters in Python, that is how scope is determined, i.e., indentation determines which lines belong to the function body.
def exponential_decay(t, y0=1.0, k=1.0):
"""
Evaluate the exponential decay function y0 * exp(-k*t).
Parameters
----------
t : float or array-like — time value(s)
y0 : float — initial value (default 1.0)
k : float — decay rate (default 1.0)
"""
return y0 * np.exp(-k * t)
t_vals = np.linspace(0, 5, 6) # create input grid, i.e., [0, 1, 2, 3, 4, 5]
print(exponential_decay(t_vals)) # uses defaults y0=1, k=1
print(exponential_decay(t_vals, y0=2.0, k=0.5)) # override defaults[1. 0.36787944 0.13533528 0.04978707 0.01831564 0.00673795]
[2. 1.21306132 0.73575888 0.44626032 0.27067057 0.16417 ]For short, one-line functions, Python offers lambda expressions:
f = lambda t, y: -2 * y # represents dy/dt = -2y
print(f(0, 1)) # -2.0-2Lambda functions are often used when passing a function as an argument to another function, as we will see with ODE solvers.
Python functions can return multiple values as a tuple:
def sincos(x):
"""Return (sin(x), cos(x)) as a tuple."""
return np.sin(x), np.cos(x)
s, c = sincos(np.pi / 4)
print(f"sin(π/4) = {s:.6f}")
print(f"cos(π/4) = {c:.6f}")sin(π/4) = 0.707107
cos(π/4) = 0.707107We use Matplotlib for all plotting (Hunter 2007). The standard import is:
import matplotlib.pyplot as pltThe Matplotlib gallery is an excellent resource for example plots with source code.
import matplotlib.pyplot as plt
import numpy as np
# --- Data ---
t = np.linspace(0, 4 * np.pi, 400) # 400 points from 0 to 4π
# --- Create figure and axes ---
fig, ax = plt.subplots(figsize=(8, 4))
# --- Plot curves ---
ax.plot(t, np.sin(t), label=r'$\sin(t)$', color='steelblue', linewidth=2)
ax.plot(t, np.cos(t), label=r'$\cos(t)$', color='tomato', linewidth=2, linestyle='--')
# --- Labels and formatting ---
ax.set_xlabel('t', fontsize=13)
ax.set_ylabel('y', fontsize=13)
ax.set_title('Sine and Cosine', fontsize=14)
ax.legend(fontsize=12)
ax.axhline(0, color='black', linewidth=0.8) # draw y = 0 line
ax.grid(True, linestyle=':', alpha=0.6)
plt.tight_layout()
plt.show()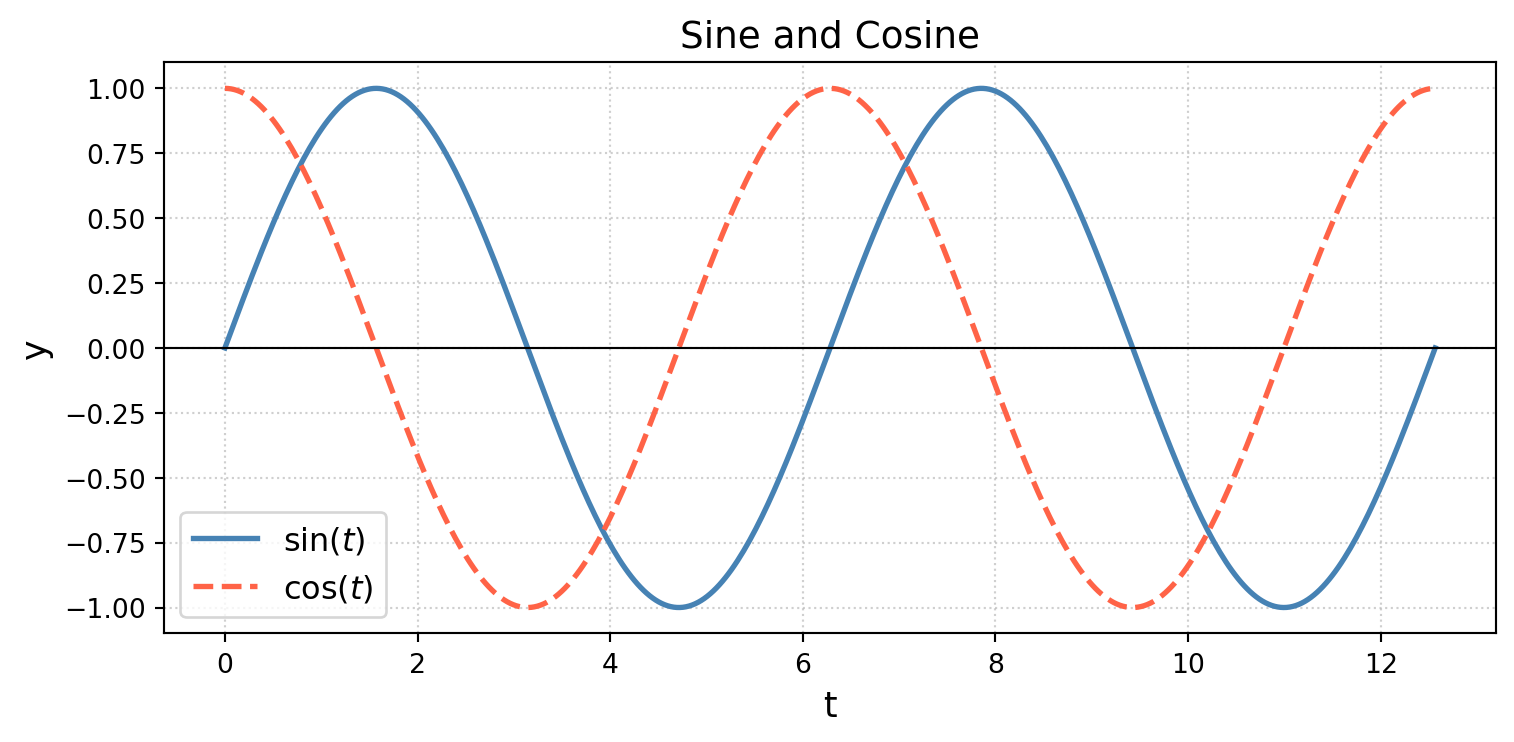
Key ideas:
fig, ax = plt.subplots() creates a figure (the whole image) and an axes (the plotting region). This is the recommended, object-oriented style.ax.plot(x, y) draws a line.r'$ ... $'.plt.tight_layout() adjusts spacing to prevent clipped labels.fig, axes = plt.subplots(1, 2, figsize=(10, 4)) # 1 row, 2 columns
t = np.linspace(0, 4*np.pi, 400)
axes[0].plot(t, np.sin(t), color='steelblue', linewidth=2)
axes[0].set_title(r'$y = \sin(t)$')
axes[0].set_xlabel('t')
axes[0].grid(True, linestyle=':', alpha=0.6)
axes[1].plot(t, np.exp(-0.3 * t) * np.sin(t), color='tomato', linewidth=2)
axes[1].set_title(r'$y = e^{-0.3t}\sin(t)$')
axes[1].set_xlabel('t')
axes[1].grid(True, linestyle=':', alpha=0.6)
plt.tight_layout()
plt.show()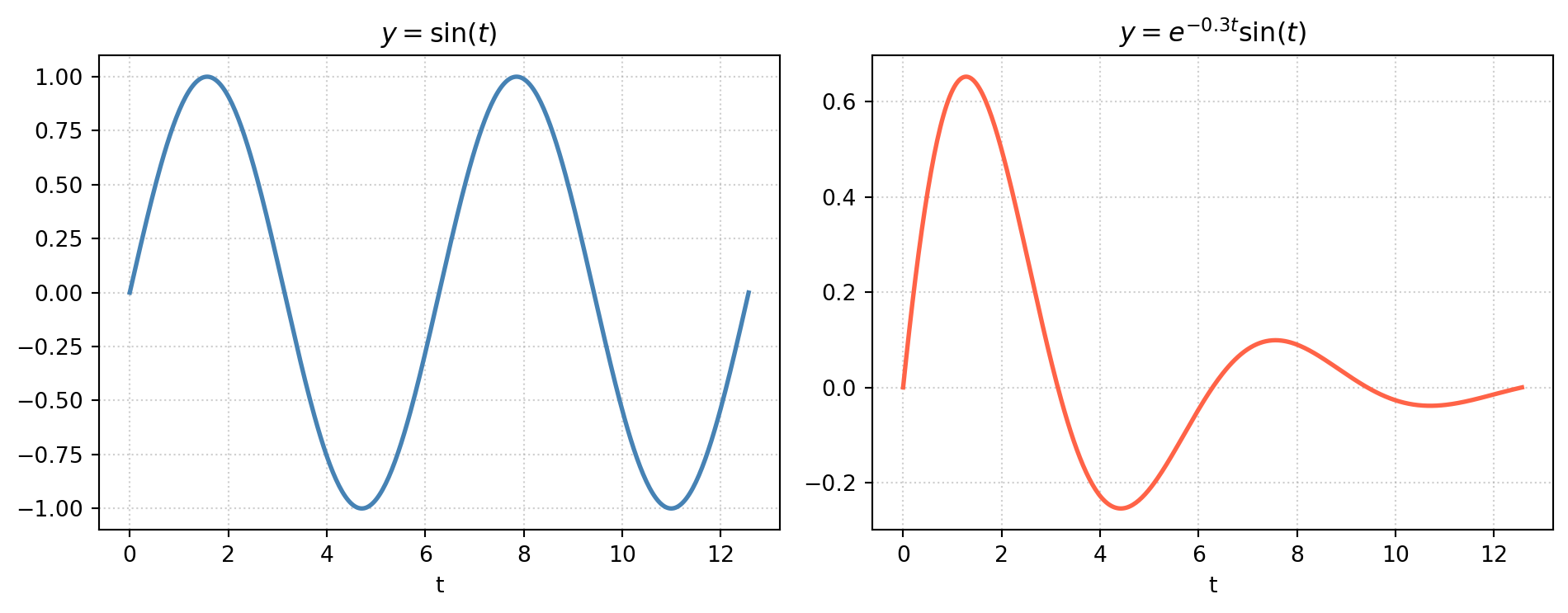
fig.savefig("my_figure.png", dpi=150, bbox_inches="tight")
fig.savefig("my_figure.pdf") # vector format; best for documentsIn the study of differential equations, direction fields (also called slope fields for first-order equations or vector fields for systems) are invaluable for understanding qualitative behavior.
For \(\dfrac{dy}{dt} = f(t, y)\), we draw a short line segment at each grid point \((t, y)\) with slope \(f(t, y)\).
import matplotlib.pyplot as plt
import numpy as np
# ODE: dy/dt = t - y
def f(t, y):
return t - y
# Create a grid of (t, y) values
t_vals = np.linspace(-1, 4, 20)
y_vals = np.linspace(-2, 5, 20)
T, Y = np.meshgrid(t_vals, y_vals)
# Compute slope at each grid point
dY = f(T, Y)
dT = np.ones_like(dY) # dt component is always 1
# Normalize for uniform arrow length
magnitude = np.sqrt(dT**2 + dY**2)
dT_norm = dT / magnitude
dY_norm = dY / magnitude
fig, ax = plt.subplots(figsize=(7, 6))
ax.quiver(T, Y, dT_norm, dY_norm,
angles='xy', color='steelblue', alpha=0.8, scale=25)
# Overlay a particular solution for reference
from scipy.integrate import solve_ivp
sol = solve_ivp(f, [-1, 4], [3.0], dense_output=True)
t_plot = np.linspace(-1, 4, 200)
ax.plot(t_plot, sol.sol(t_plot)[0], 'tomato', linewidth=2.5,
label=r'Solution with $y(-1)=3$')
ax.set_xlabel('t', fontsize=13)
ax.set_ylabel('y', fontsize=13)
ax.set_title(r"Slope field: $\dfrac{dy}{dt} = t - y$", fontsize=14)
ax.legend(fontsize=12)
ax.set_xlim(-1, 4)
ax.set_ylim(-2, 5)
ax.grid(True, linestyle=':', alpha=0.5)
plt.tight_layout()
plt.show()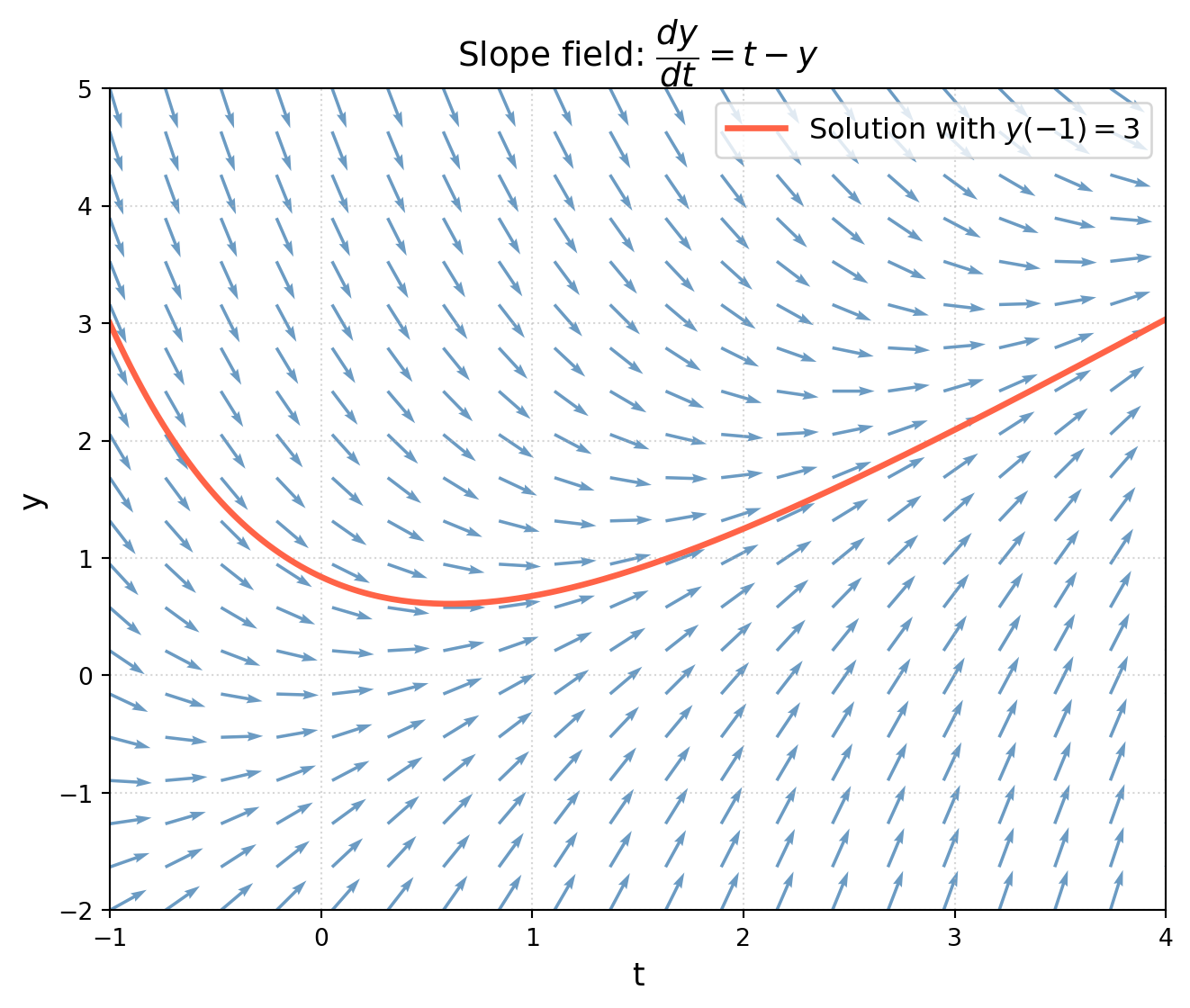
For the system \(\dfrac{d\mathbf{x}}{dt} = A\mathbf{x}\), we draw arrows at each grid point \((x_1, x_2)\) pointing in the direction \((f_1, f_2)\).
# System: dx/dt = -x + y, dy/dt = -x - y
def system(X, Y):
dX = -X + Y
dY = -X - Y
return dX, dY
x_vals = np.linspace(-3, 3, 18)
y_vals = np.linspace(-3, 3, 18)
X, Y = np.meshgrid(x_vals, y_vals)
dX, dY = system(X, Y)
mag = np.sqrt(dX**2 + dY**2)
dX_n = dX / mag
dY_n = dY / mag
fig, ax = plt.subplots(figsize=(6, 6))
ax.quiver(X, Y, dX_n, dY_n, mag, cmap='coolwarm', alpha=0.9)
ax.set_xlabel(r'$x_1$', fontsize=13)
ax.set_ylabel(r'$x_2$', fontsize=13)
ax.set_title(r"Vector field: $\dot{x}_1 = -x_1+x_2,\;\dot{x}_2 = -x_1-x_2$",
fontsize=12)
ax.set_aspect('equal')
ax.grid(True, linestyle=':', alpha=0.5)
plt.tight_layout()
plt.show()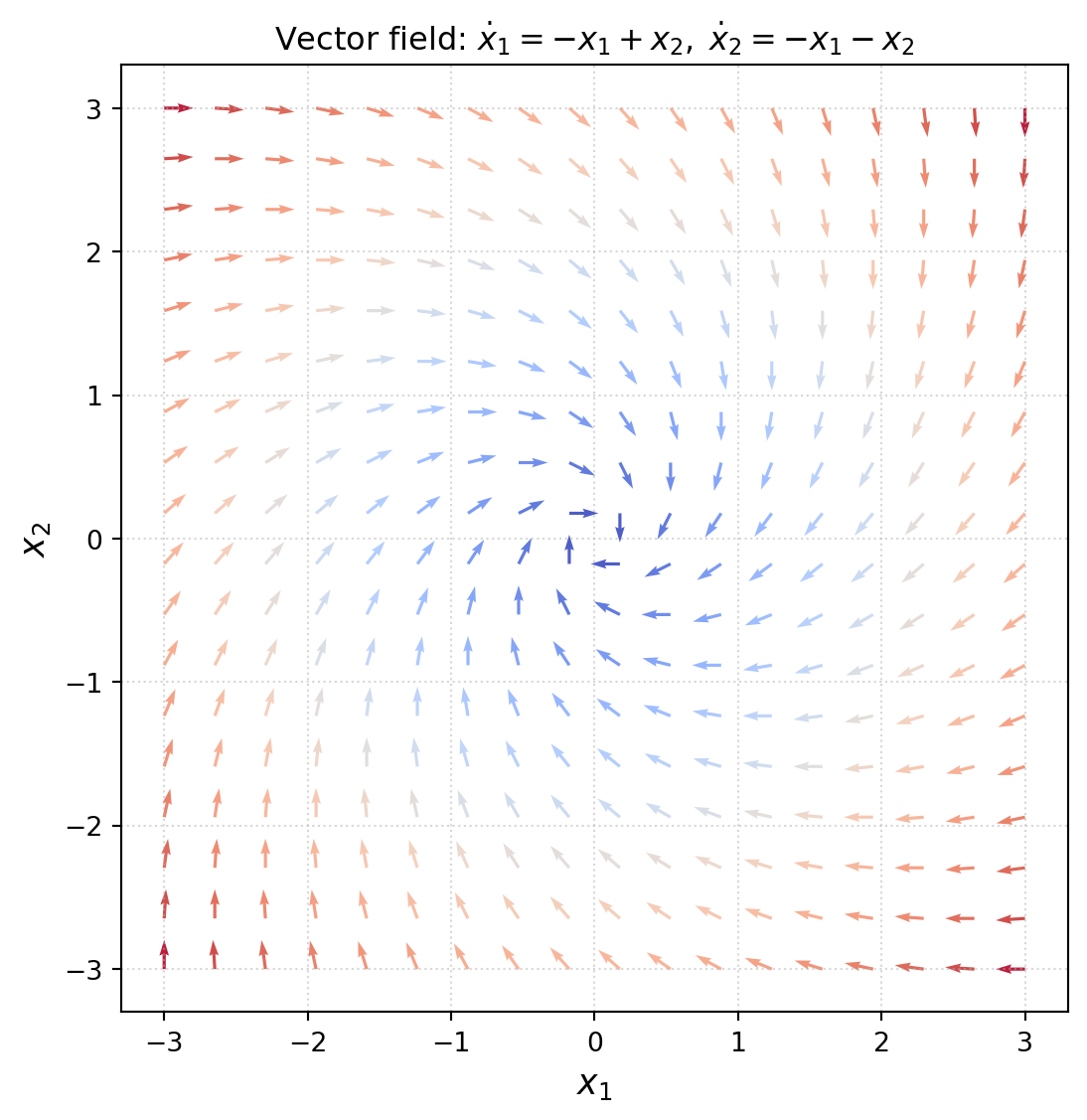
The cmap='coolwarm' coloring encodes the speed (magnitude) of the vector field — blue regions are slow, red regions are fast.
NumPy (Numerical Python) is the foundation of scientific computing in Python (Harris et al. 2020). Its central object is the ndarray — an efficient, multidimensional array.
Full documentation: https://numpy.org/doc/stable/
import numpy as np
# From a Python list
a = np.array([1, 2, 3, 4, 5])
print(a) # [1 2 3 4 5]
print(a.dtype) # int64 (data type)
print(a.shape) # (5,) (dimensions)
# Floating-point array
b = np.array([1.0, 2.0, 3.0])
print(b.dtype) # float64
# 2-D array (matrix)
A = np.array([[1, 2, 3],
[4, 5, 6]])
print(A.shape) # (2, 3) → 2 rows, 3 columns[1 2 3 4 5]
int64
(5,)
float64
(2, 3)print(np.zeros(4)) # [0. 0. 0. 0.]
print(np.ones((2, 3))) # 2×3 matrix of ones
print(np.eye(3)) # 3×3 identity matrix
print(np.linspace(0, 1, 5)) # [0. 0.25 0.5 0.75 1. ]
print(np.arange(0, 10, 2)) # [0 2 4 6 8][0. 0. 0. 0.]
[[1. 1. 1.]
[1. 1. 1.]]
[[1. 0. 0.]
[0. 1. 0.]
[0. 0. 1.]]
[0. 0.25 0.5 0.75 1. ]
[0 2 4 6 8]NumPy operations act element-wise by default:
a = np.array([1.0, 2.0, 3.0])
b = np.array([4.0, 5.0, 6.0])
print(a + b) # [5. 7. 9.]
print(a * b) # [ 4. 10. 18.] ← element-wise product
print(a ** 2) # [1. 4. 9.]
print(np.sqrt(a)) # [1. 1.414 1.732][5. 7. 9.]
[ 4. 10. 18.]
[1. 4. 9.]
[1. 1.41421356 1.73205081]a * b is not matrix multiplication. For matrix multiplication use A @ B or np.dot(A, B).
A = np.array([[1, 2], [3, 4]])
B = np.array([[5, 6], [7, 8]])
print(A @ B) # matrix product[[19 22]
[43 50]]NumPy provides vectorized versions of all standard math functions:
t = np.linspace(0, np.pi, 5)
print(np.sin(t))
print(np.exp(-t))
print(np.log(t + 1))[0.00000000e+00 7.07106781e-01 1.00000000e+00 7.07106781e-01
1.22464680e-16]
[1. 0.45593813 0.20787958 0.09478022 0.04321392]
[0. 0.57964145 0.94421571 1.21080774 1.42108041]These are far faster than looping over elements manually.
a = np.array([10, 20, 30, 40, 50])
print(a[0]) # 10 (first element)
print(a[-1]) # 50 (last element)
print(a[1:4]) # [20 30 40] (slice: indices 1,2,3)
print(a[::2]) # [10 30 50] (every other element)
# 2-D indexing
A = np.arange(12).reshape(3, 4)
print(A)
print(A[1, 2]) # element in row 1, column 2
print(A[:, 1]) # all rows, column 1 (column vector)
print(A[0, :]) # row 010
50
[20 30 40]
[10 30 50]
[[ 0 1 2 3]
[ 4 5 6 7]
[ 8 9 10 11]]
6
[1 5 9]
[0 1 2 3]SciPy builds on NumPy and provides algorithms for optimization, integration, interpolation, signal processing, statistics, and — most importantly for us — differential equations (Virtanen et al. 2020).
Full documentation: https://docs.scipy.org/doc/scipy/
SciPy is organized into submodules:
| Submodule | Content |
|---|---|
scipy.integrate |
Numerical integration, ODE solvers |
scipy.linalg |
Linear algebra |
scipy.optimize |
Root-finding, minimization |
scipy.signal |
Signal processing |
scipy.sparse |
Sparse matrices |
Import submodules explicitly:
from scipy import integrate, linalgSciPy’s ODE solvers and linear algebra routines are covered in the dedicated sections below.
SymPy is a Python library for symbolic mathematics — it performs exact algebraic manipulations rather than numerical approximations (Meurer et al. 2017). Think of it as a free, Python-native computer algebra system (CAS).
Full documentation: https://docs.sympy.org/latest/
import sympy as sym
# Declare symbolic variables
t, y, C1, C2, k = sym.symbols('t y C1 C2 k', real=True)
# Build expressions
expr = sym.exp(-k * t) * sym.sin(t)
print(expr)exp(-k*t)*sin(t)sym.init_printing() # enable pretty output in Jupyter/Quarto
expr2 = sym.sin(t)**2 + sym.cos(t)**2
print(sym.simplify(expr2)) # → 11# Differentiation
f = sym.exp(-t) * sym.sin(2 * t)
df = sym.diff(f, t)
print("f'(t) =", df)
# Integration (indefinite)
integral = sym.integrate(f, t)
print("∫f dt =", integral)
# Definite integral
result = sym.integrate(sym.sin(t), (t, 0, sym.pi))
print("∫₀^π sin(t) dt =", result) # 2f'(t) = -exp(-t)*sin(2*t) + 2*exp(-t)*cos(2*t)
∫f dt = -exp(-t)*sin(2*t)/5 - 2*exp(-t)*cos(2*t)/5
∫₀^π sin(t) dt = 2x = sym.Symbol('x')
solutions = sym.solve(x**2 - 5*x + 6, x)
print(solutions) # [2, 3][2, 3]| Feature | SymPy (symbolic) | NumPy/SciPy (numerical) |
|---|---|---|
| Results | Exact | Approximate (float) |
| Speed | Slower | Faster |
| Good for | Deriving formulas, exact solutions | Large-scale computation |
You can convert a SymPy expression to a fast numerical function with sym.lambdify:
f_sym = sym.sin(t) * sym.exp(-t)
f_num = sym.lambdify(t, f_sym, modules='numpy') # converts to NumPy function
t_vals = np.linspace(0, 5, 200)
y_vals = f_num(t_vals) # fast NumPy evaluation
print(y_vals[:5])[0. 0.02449962 0.04776835 0.06983789 0.09073981]scipy.integrate.solve_ivp is the primary tool for solving initial value problems (IVPs) numerically. It implements several Runge–Kutta and multi-step methods.
General call signature:
solve_ivp(fun, t_span, y0, method='RK45', t_eval=None, ...)| Argument | Meaning |
|---|---|
fun |
Function f(t, y) defining \(y' = f(t,y)\) |
t_span |
(t0, tf) — start and end times |
y0 |
Initial condition (list or array) |
method |
ODE algorithm (default 'RK45') |
t_eval |
Times at which to store the solution |
Solve \(y' = -2y\), \(y(0) = 3\), and compare with the exact solution \(y(t) = 3e^{-2t}\).
from scipy.integrate import solve_ivp
def ode(t, y):
"""dy/dt = -2*y"""
return [-2 * y[0]] # must return a list/array
t_span = (0, 4)
y0 = [3.0] # initial condition as a list
t_eval = np.linspace(0, 4, 200) # times at which to record solution
sol = solve_ivp(ode, t_span, y0, method='RK45', t_eval=t_eval)
# sol.t → time values
# sol.y → array of shape (n_variables, n_times)
# Exact solution for comparison
y_exact = 3 * np.exp(-2 * sol.t)
fig, ax = plt.subplots(figsize=(7, 4))
ax.plot(sol.t, sol.y[0], 'steelblue', linewidth=2.5, label='RK45 (numerical)')
ax.plot(sol.t, y_exact, 'tomato', linewidth=1.5, linestyle='--',
label=r'Exact: $3e^{-2t}$')
ax.set_xlabel('t', fontsize=13)
ax.set_ylabel('y(t)', fontsize=13)
ax.set_title(r"$y' = -2y,\quad y(0)=3$", fontsize=14)
ax.legend(fontsize=12)
ax.grid(True, linestyle=':', alpha=0.6)
plt.tight_layout()
plt.show()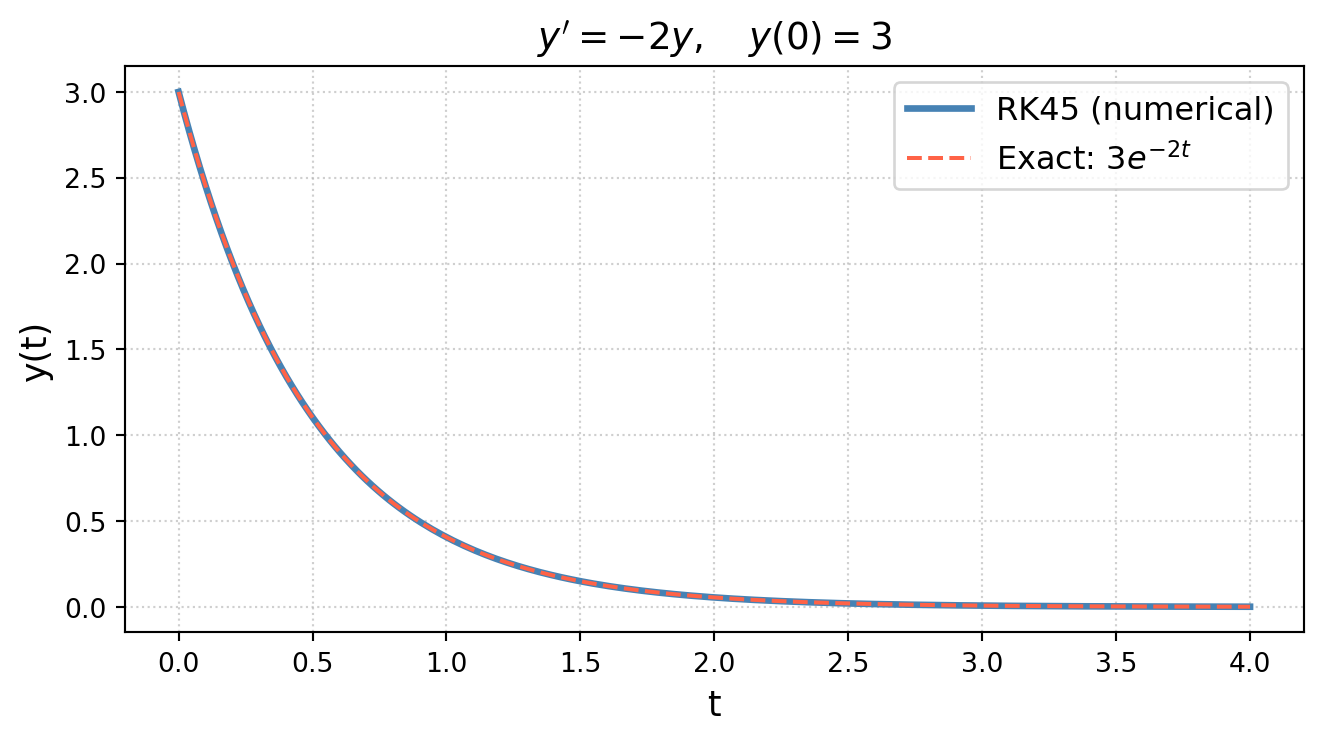
Solve the damped harmonic oscillator: \(m x'' + c x' + k x = 0\).
We reduce to a first-order system: let \(x_1 = x\), \(x_2 = x'\). Then
\[x_1' = x_2, \qquad x_2' = -\frac{k}{m} x_1 - \frac{c}{m} x_2.\]
from scipy.integrate import solve_ivp
m = 1.0 # mass
c = 0.4 # damping coefficient
k = 5.0 # spring constant
def oscillator(t, state):
"""
Damped harmonic oscillator as a first-order system.
state = [x1, x2] = [position, velocity]
"""
x1, x2 = state
dx1 = x2
dx2 = -(k/m) * x1 - (c/m) * x2
return [dx1, dx2]
t_span = (0, 20)
y0 = [2.0, 0.0] # initial position = 2, initial velocity = 0
t_eval = np.linspace(0, 20, 500)
sol = solve_ivp(oscillator, t_span, y0, method='RK45', t_eval=t_eval)
fig, ax = plt.subplots(figsize=(8, 4))
ax.plot(sol.t, sol.y[0], 'steelblue', linewidth=2, label='Position $x(t)$')
ax.plot(sol.t, sol.y[1], 'tomato', linewidth=2, label='Velocity $x\'(t)$')
ax.set_xlabel('t', fontsize=13)
ax.set_ylabel('State', fontsize=13)
ax.set_title('Damped Harmonic Oscillator', fontsize=14)
ax.legend(fontsize=12)
ax.grid(True, linestyle=':', alpha=0.6)
plt.tight_layout()
plt.show()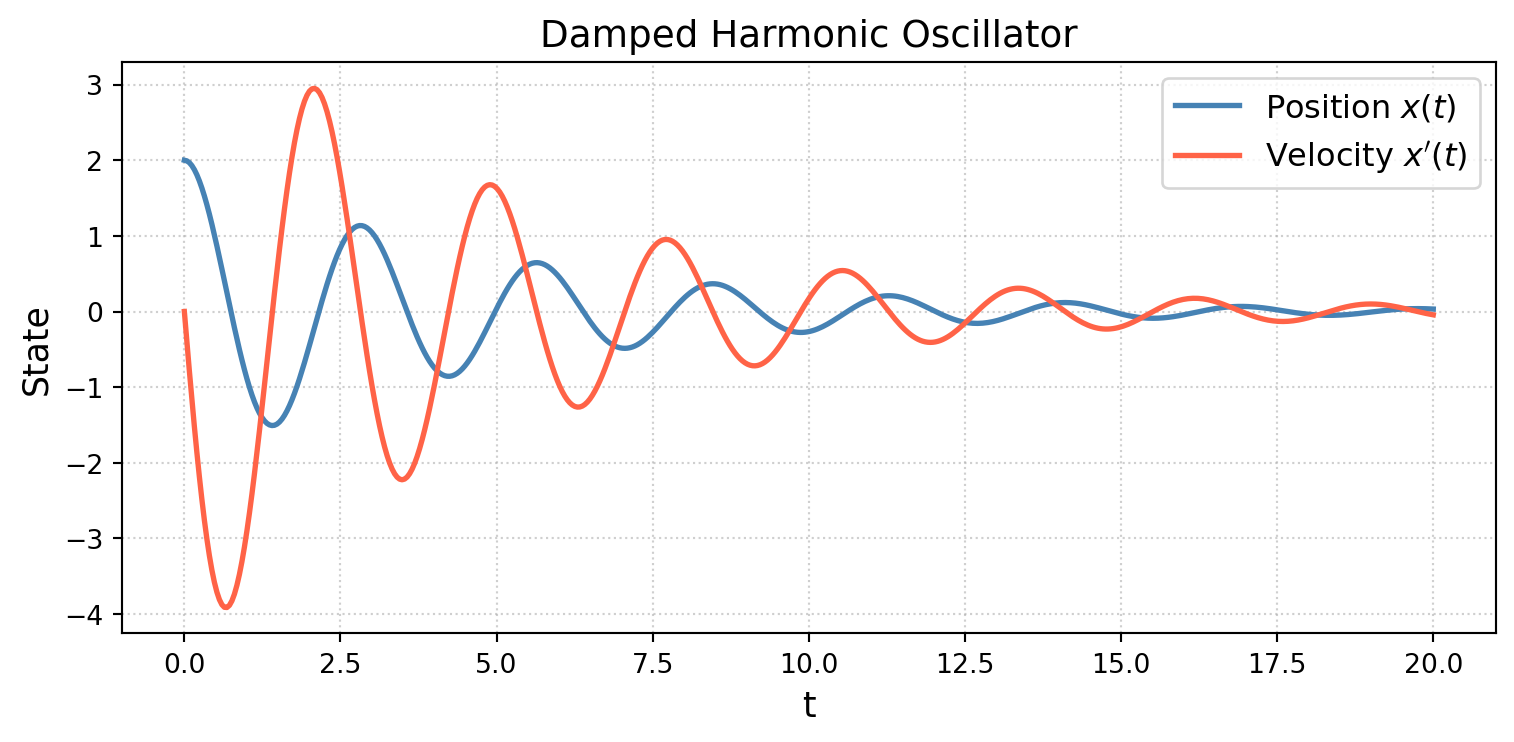
Solve \(y'' + y = \cos(t)\) (resonance) with \(y(0) = 0\), \(y'(0) = 0\).
from scipy.integrate import solve_ivp
def forced_oscillator(t, state):
x1, x2 = state
dx1 = x2
dx2 = -x1 + np.cos(t) # forcing term cos(t) at natural frequency
return [dx1, dx2]
t_span = (0, 40)
y0 = [0.0, 0.0]
t_eval = np.linspace(0, 40, 800)
sol = solve_ivp(forced_oscillator, t_span, y0, method='RK45', t_eval=t_eval,
rtol=1e-8, atol=1e-10) # tighter tolerances for accuracy
fig, ax = plt.subplots(figsize=(9, 4))
ax.plot(sol.t, sol.y[0], 'steelblue', linewidth=1.5)
ax.set_xlabel('t', fontsize=13)
ax.set_ylabel('y(t)', fontsize=13)
ax.set_title(r"Resonance: $y'' + y = \cos(t)$", fontsize=14)
ax.grid(True, linestyle=':', alpha=0.6)
plt.tight_layout()
plt.show()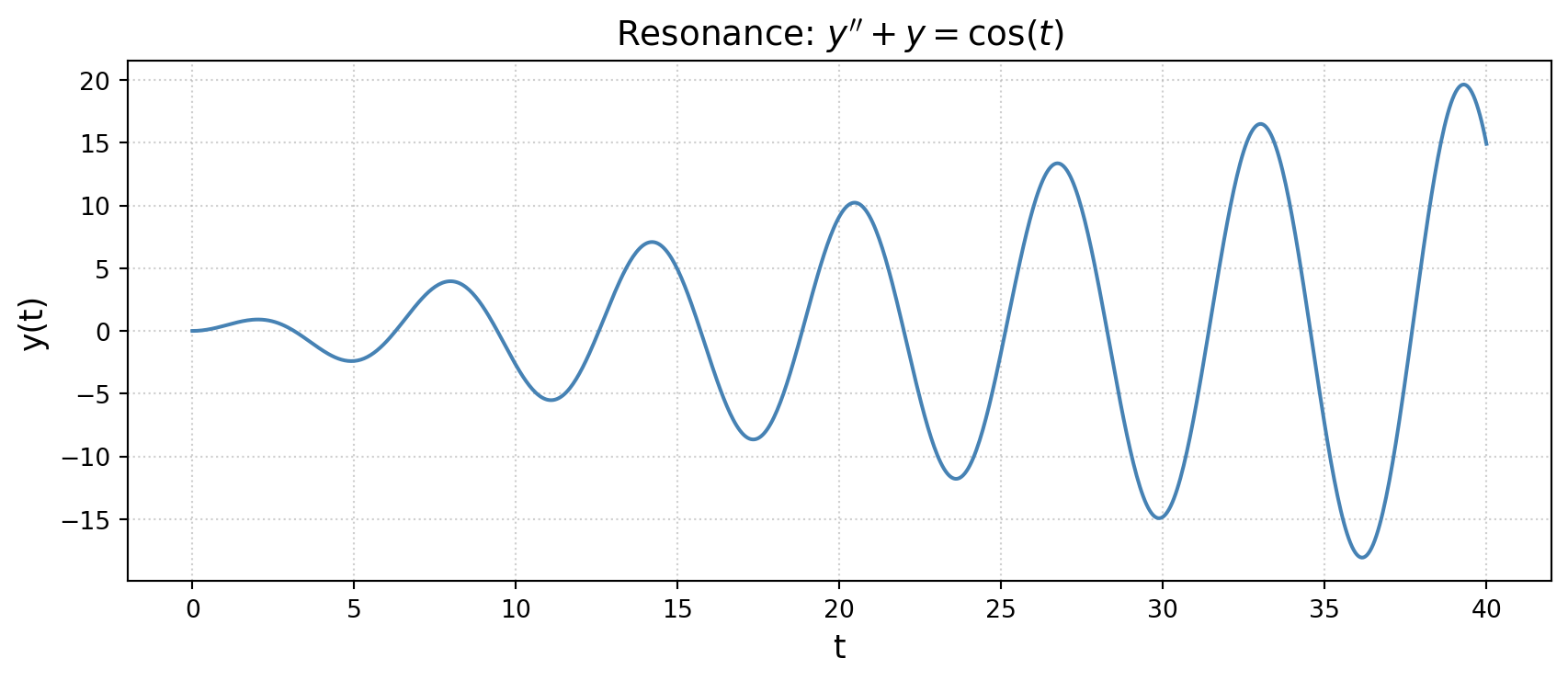
solve_ivpmethod |
Description |
|---|---|
'RK45' |
Runge–Kutta 4(5); default; good for most problems |
'RK23' |
Runge–Kutta 2(3); lower accuracy, faster |
'DOP853' |
Dormand–Prince 8(5,3); high accuracy |
'Radau' |
Implicit Runge–Kutta; best for stiff problems |
'BDF' |
Backward differentiation formula; stiff problems |
'LSODA' |
Automatically detects stiffness |
# Accessing the solution object
print("Success?", sol.success)
print("Message:", sol.message)
print("Solution shape (n_vars × n_times):", sol.y.shape)Success? True
Message: The solver successfully reached the end of the integration interval.
Solution shape (n_vars × n_times): (2, 800)SymPy can find exact, closed-form solutions to ODEs when they exist.
import sympy as sym
t = sym.Symbol('t')
y = sym.Function('y') # y is a function of tSolve \(y' + 2y = 4\), \(y(0) = 1\).
ode_eq = sym.Eq(y(t).diff(t) + 2*y(t), 4)
general = sym.dsolve(ode_eq, y(t))
print("General solution:", general)
# Apply initial condition y(0) = 1
C1 = sym.Symbol('C1')
ic = {C1: sym.solve(general.rhs.subs(t, 0) - 1, C1)[0]}
particular = general.subs(ic)
print("Particular solution:", particular)General solution: Eq(y(t), C1*exp(-2*t) + 2)
Particular solution: Eq(y(t), 2 - exp(-2*t))Solve \(y'' - 3y' + 2y = 0\), \(y(0) = 0\), \(y'(0) = 1\).
ode2 = sym.Eq(y(t).diff(t,2) - 3*y(t).diff(t) + 2*y(t), 0)
general2 = sym.dsolve(ode2, y(t))
print("General solution:", general2)
C1, C2 = sym.symbols('C1 C2')
ics = sym.solve([
general2.rhs.subs(t, 0) - 0, # y(0) = 0
general2.rhs.diff(t).subs(t, 0) - 1 # y'(0) = 1
], [C1, C2])
particular2 = general2.subs(ics)
print("Particular solution:", particular2)General solution: Eq(y(t), (C1 + C2*exp(t))*exp(t))
Particular solution: Eq(y(t), (exp(t) - 1)*exp(t))Solve \(y'' + y = \sin(t)\) (the resonance equation) symbolically.
ode3 = sym.Eq(y(t).diff(t,2) + y(t), sym.sin(t))
general3 = sym.dsolve(ode3, y(t))
print(general3)Eq(y(t), C2*sin(t) + (C1 - t/2)*cos(t))import numpy as np
A = np.array([[2, 1],
[5, 3]], dtype=float)
b = np.array([4, 7], dtype=float)
print("Matrix A:\n", A)
print("Vector b:", b)Matrix A:
[[2. 1.]
[5. 3.]]
Vector b: [4. 7.]from scipy import linalg
x = linalg.solve(A, b)
print("Solution x:", x)
# Verify: A @ x should equal b
print("Residual A @ x - b:", A @ x - b)Solution x: [ 5. -6.]
Residual A @ x - b: [0.00000000e+00 3.55271368e-15]# Transpose
print("A^T:\n", A.T)
# Determinant
print("det(A):", linalg.det(A))
# Inverse
print("A^{-1}:\n", linalg.inv(A))
# Matrix–vector product
print("A @ x:", A @ x)
# Matrix–matrix product
B = np.array([[1, 0], [0, 2]], dtype=float)
print("A @ B:\n", A @ B)A^T:
[[2. 5.]
[1. 3.]]
det(A): 1.0
A^{-1}:
[[ 3. -1.]
[-5. 2.]]
A @ x: [4. 7.]
A @ B:
[[2. 2.]
[5. 6.]]For a square matrix \(A\), the eigenvalue problem is \(A\mathbf{v} = \lambda \mathbf{v}\).
import numpy as np
from scipy import linalg
A = np.array([[4, 1],
[2, 3]], dtype=float)
# Using NumPy (returns unsorted eigenvalues)
eigenvalues, eigenvectors = np.linalg.eig(A)
print("Eigenvalues (NumPy):", eigenvalues)
print("Eigenvectors (columns):\n", eigenvectors)Eigenvalues (NumPy): [5. 2.]
Eigenvectors (columns):
[[ 0.70710678 -0.4472136 ]
[ 0.70710678 0.89442719]]# Using SciPy (more options; can return left eigenvectors, etc.)
vals, vecs = linalg.eig(A)
print("Eigenvalues (SciPy):", vals.real)
# The j-th eigenvector is vecs[:, j]
for j in range(len(vals)):
lam = vals[j].real
v = vecs[:, j].real
print(f" λ = {lam:.4f}, v = {v}")
print(f" Verify A @ v = λ * v: {np.allclose(A @ v, lam * v)}")Eigenvalues (SciPy): [5. 2.]
λ = 5.0000, v = [0.70710678 0.70710678]
Verify A @ v = λ * v: True
λ = 2.0000, v = [-0.4472136 0.89442719]
Verify A @ v = λ * v: Truenp.linalg.eig and scipy.linalg.eig may return complex eigenvalues even for real matrices (when complex eigenvalues occur in conjugate pairs). Use .real and .imag to extract real and imaginary parts.
# Symmetric matrices: use eigh for guaranteed real, sorted eigenvalues
C = np.array([[3, 1], [1, 2]], dtype=float)
vals_sym, vecs_sym = np.linalg.eigh(C)
print("Eigenvalues of symmetric matrix:", vals_sym)Eigenvalues of symmetric matrix: [1.38196601 3.61803399]import sympy as sym
A = sym.Matrix([[4, 1],
[2, 3]])
print("Matrix A:")
sym.pprint(A)
# Determinant and inverse
print("\ndet(A) =", A.det())
print("\nA^{-1}:")
sym.pprint(A.inv())Matrix A:
⎡4 1⎤
⎢ ⎥
⎣2 3⎦
det(A) = 10
A^{-1}:
⎡3/10 -1/10⎤
⎢ ⎥
⎣-1/5 2/5 ⎦b = sym.Matrix([5, 4])
x = A.solve(b)
print("Solution x:", x.T)Solution x: Matrix([[11/10, 3/5]])# eigenvals() returns {eigenvalue: algebraic_multiplicity, ...}
evals = A.eigenvals()
print("Eigenvalues:", evals)
# eigenvects() returns [(eigenvalue, multiplicity, [eigenvectors]), ...]
evects = A.eigenvects()
for lam, mult, vecs in evects:
print(f"\nλ = {lam} (multiplicity {mult})")
for v in vecs:
print(f" eigenvector: {v.T}")Eigenvalues: {5: 1, 2: 1}
λ = 2 (multiplicity 1)
eigenvector: Matrix([[-1/2, 1]])
λ = 5 (multiplicity 1)
eigenvector: Matrix([[1, 1]])# Diagonalization: A = P * D * P^{-1}
P, D = A.diagonalize()
print("P ="); sym.pprint(P)
print("D ="); sym.pprint(D)
print("P * D * P^{-1} ="); sym.pprint(sym.simplify(P * D * P.inv()))P =
⎡-1 1⎤
⎢ ⎥
⎣2 1⎦
D =
⎡2 0⎤
⎢ ⎥
⎣0 5⎦
P * D * P^{-1} =
⎡4 1⎤
⎢ ⎥
⎣2 3⎦# Symbolic matrix with a parameter
a = sym.Symbol('a')
B = sym.Matrix([[a, 1], [1, a]])
print("Eigenvalues of [[a,1],[1,a]]:", B.eigenvals())Eigenvalues of [[a,1],[1,a]]: {a - 1: 1, a + 1: 1}A phase portrait shows the trajectories of a two-dimensional autonomous system \[\frac{d\mathbf{x}}{dt} = \mathbf{f}(\mathbf{x}), \qquad \mathbf{x} = (x_1, x_2)^T,\] in the \((x_1, x_2)\) plane (the phase plane) for many different initial conditions.
from scipy.integrate import solve_ivp
def linear_system(t, state, A):
"""Linear system dx/dt = A*x."""
return A @ np.array(state)
# System matrix
A_mat = np.array([[-1, 2],
[-2, -1]], dtype=float)
# Grid for the vector field
x1 = np.linspace(-3, 3, 18)
x2 = np.linspace(-3, 3, 18)
X1, X2 = np.meshgrid(x1, x2)
dX1 = A_mat[0, 0]*X1 + A_mat[0, 1]*X2
dX2 = A_mat[1, 0]*X1 + A_mat[1, 1]*X2
mag = np.sqrt(dX1**2 + dX2**2)
fig, ax = plt.subplots(figsize=(7, 7))
# Plot the vector field
ax.quiver(X1, X2, dX1/mag, dX2/mag, mag,
cmap='Blues', alpha=0.7, scale=28)
# Plot several trajectories from different initial conditions
initial_conditions = [
[2.5, 0], [-2.5, 0], [0, 2.5], [0, -2.5],
[2, 2], [-2, -2], [2, -2], [-2, 2]
]
t_span = (0, 6)
t_eval = np.linspace(0, 6, 300)
for ic in initial_conditions:
sol = solve_ivp(linear_system, t_span, ic, args=(A_mat,),
t_eval=t_eval, method='RK45')
ax.plot(sol.y[0], sol.y[1], 'tomato', linewidth=1.4, alpha=0.85)
# Mark starting point
ax.plot(ic[0], ic[1], 'ko', markersize=5)
ax.set_xlabel(r'$x_1$', fontsize=13)
ax.set_ylabel(r'$x_2$', fontsize=13)
ax.set_title(
r'Phase portrait: $\dot{\mathbf{x}} = A\mathbf{x}$' +
f'\n$A = [{A_mat[0,0]:.0f},{A_mat[0,1]:.0f};{A_mat[1,0]:.0f},{A_mat[1,1]:.0f}]$',
fontsize=12
)
ax.axhline(0, color='k', linewidth=0.7)
ax.axvline(0, color='k', linewidth=0.7)
ax.set_aspect('equal')
ax.set_xlim(-3.2, 3.2)
ax.set_ylim(-3.2, 3.2)
ax.grid(True, linestyle=':', alpha=0.4)
plt.tight_layout()
plt.show()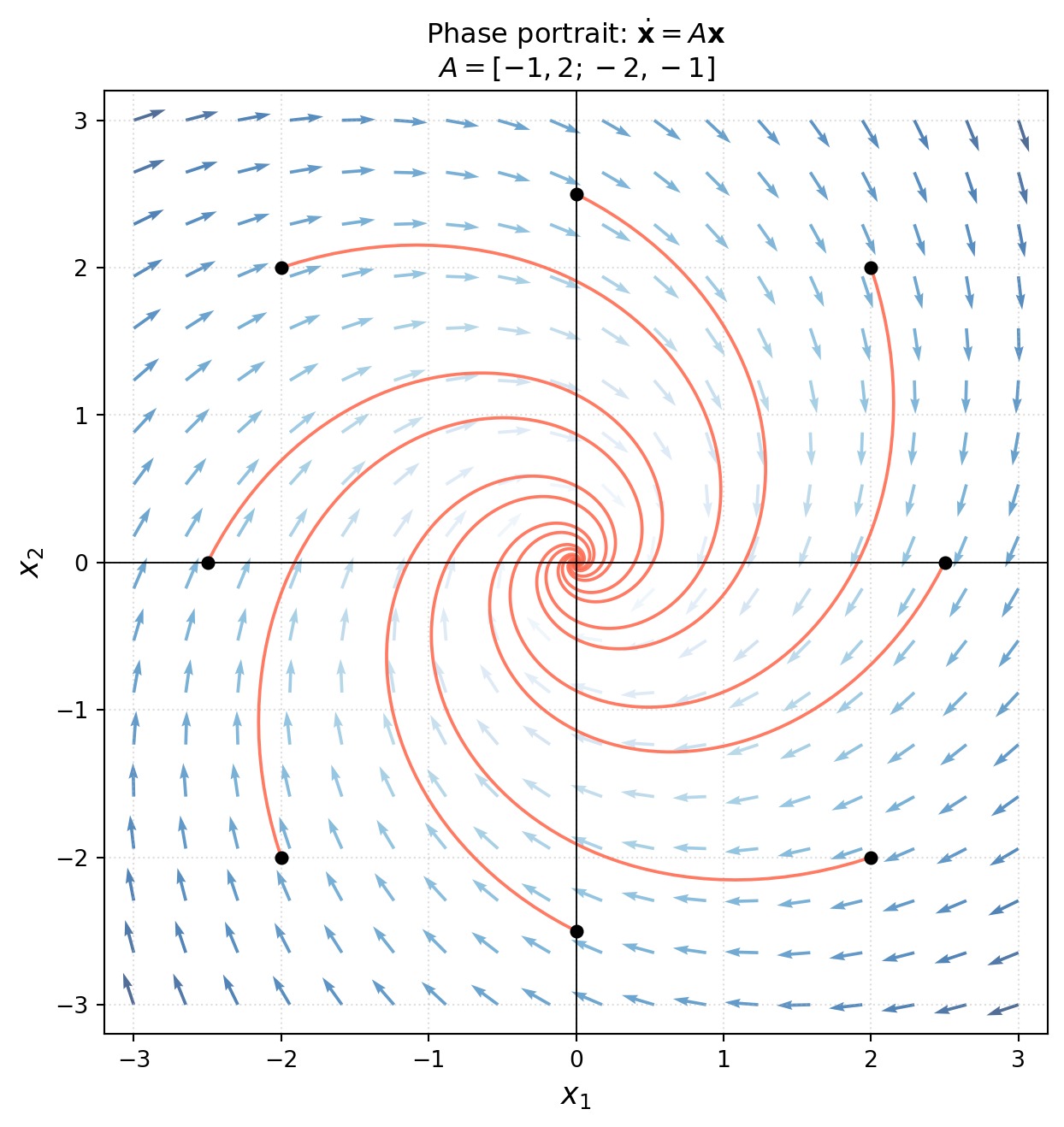
from scipy.integrate import solve_ivp
g = 9.8 # gravitational acceleration (m/s²)
L = 1.0 # pendulum length (m)
def pendulum(t, state):
"""
Nonlinear pendulum (no damping).
state = [theta, omega] (angle, angular velocity)
"""
theta, omega = state
return [omega, -(g/L) * np.sin(theta)]
x1 = np.linspace(-np.pi, np.pi, 22)
x2 = np.linspace(-5, 5, 18)
X1, X2 = np.meshgrid(x1, x2)
dX1 = X2
dX2 = -(g/L) * np.sin(X1)
mag = np.sqrt(dX1**2 + dX2**2)
fig, ax = plt.subplots(figsize=(9, 6))
ax.quiver(X1, X2, dX1/mag, dX2/mag, mag, cmap='Blues', alpha=0.6, scale=28)
for theta0 in np.linspace(-2.8, 2.8, 9):
for omega0 in [-3, -1, 0, 1, 3]:
sol = solve_ivp(pendulum, (0, 8), [theta0, omega0],
t_eval=np.linspace(0, 8, 500), method='RK45',
rtol=1e-8, atol=1e-10)
ax.plot(sol.y[0], sol.y[1], 'tomato', linewidth=0.9, alpha=0.7)
ax.set_xlabel(r'$\theta$ (rad)', fontsize=13)
ax.set_ylabel(r'$\omega$ (rad/s)', fontsize=13)
ax.set_title('Phase portrait: Nonlinear Pendulum', fontsize=14)
ax.set_xlim(-np.pi, np.pi)
ax.set_ylim(-5, 5)
ax.axhline(0, color='k', linewidth=0.7)
ax.grid(True, linestyle=':', alpha=0.4)
plt.tight_layout()
plt.show()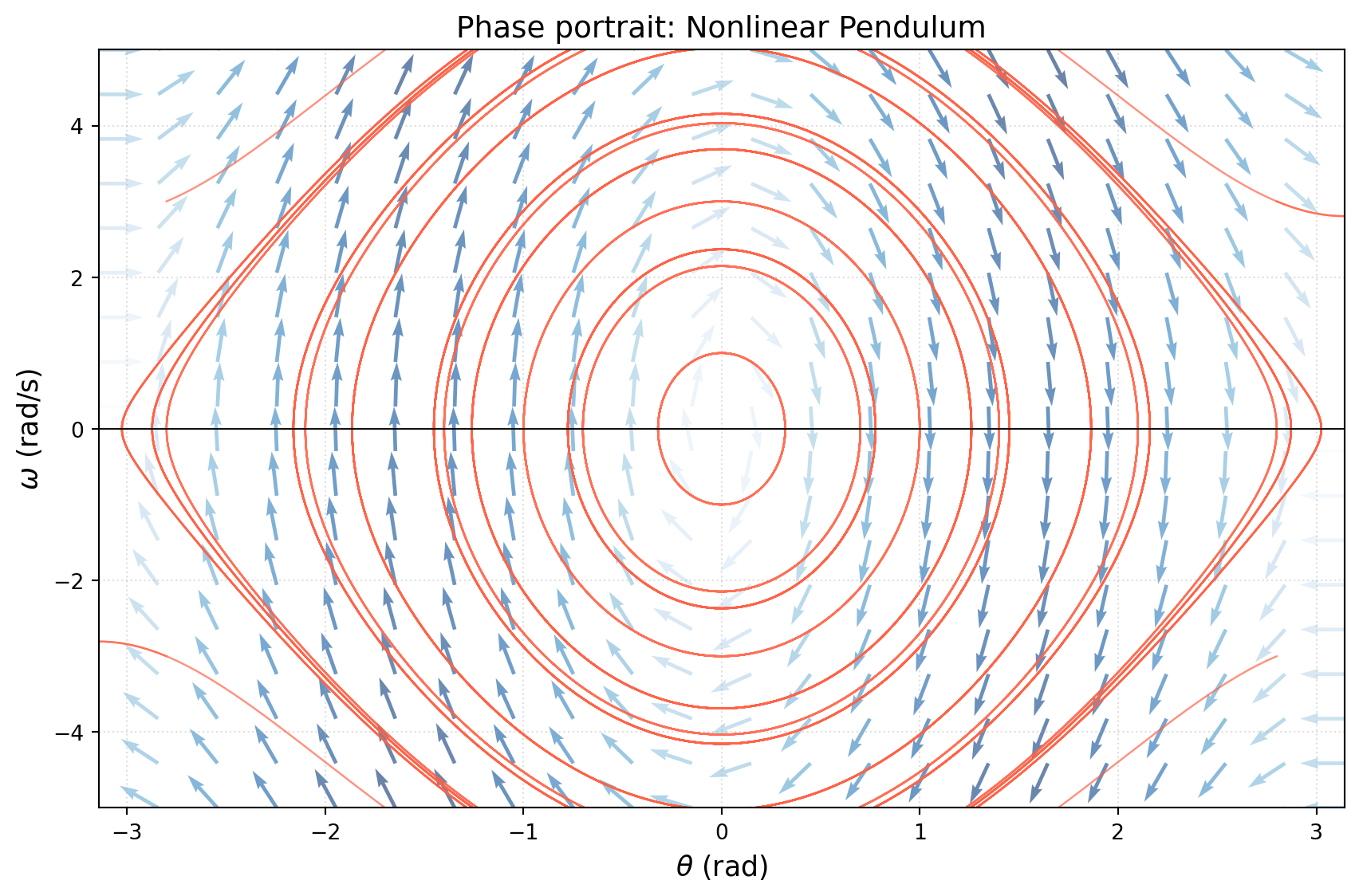
The Laplace transform \(\mathcal{L}\{f(t)\}\) is an important tool for solving linear ODEs with constant coefficients. SymPy can compute Laplace transforms and inverse Laplace transforms symbolically.
import sympy as sym
t, s = sym.symbols('t s', positive=True)
# Forward Laplace transform
f = sym.exp(-2*t) * sym.sin(3*t)
F = sym.laplace_transform(f, t, s, noconds=True)
print("L{e^{-2t} sin(3t)} =", F)L{e^{-2t} sin(3t)} = 3/((s + 2)**2 + 9)# Inverse Laplace transform
G = s / (s**2 + 4)
g = sym.inverse_laplace_transform(G, s, t)
print("L^{-1}{s/(s²+4)} =", g)L^{-1}{s/(s²+4)} = cos(2*t)# Solving an IVP via Laplace transform
# Solve y'' + 4y = 0, y(0) = 1, y'(0) = 0
Y = sym.Function('Y') # Y(s) = L{y(t)}
# Using known Laplace transform rules:
# L{y''} = s^2*Y - s*y(0) - y'(0)
# = s^2*Y - s - 0
# So: (s^2 + 4)*Y = s => Y = s/(s^2 + 4)
Y_s = s / (s**2 + 4)
y_t = sym.inverse_laplace_transform(Y_s, s, t)
print("Solution y(t) =", y_t) # cos(2t)Solution y(t) = cos(2*t)Even experienced programmers spend much of their time debugging. Here are some practical strategies.
Python’s error messages are informative. The last line tells you the error type and a short description; the lines above show the traceback — where in the code the error occurred.
# Common error types
# NameError — you used a variable or function that isn't defined
# TypeError — wrong type passed to a function
# ValueError — right type, but inappropriate value
# IndexError — index out of bounds
# ZeroDivisionError — division by zero
# AttributeError — object doesn't have the attribute/method you calledprint StatementsInsert print() calls to inspect intermediate values:
def my_ode(t, y):
result = -2 * y[0]
print(f"t={t:.3f}, y={y[0]:.6f}, f={result:.6f}") # debug line
return [result]Shape mismatches are a common source of errors in NumPy code:
print(A.shape) # always check shapes when something looks wrong
print(b.shape)import sys
print("Python version:", sys.version)
print('\n'.join(f'{m.__name__}=={m.__version__}' for m in globals().values() if getattr(m, '__version__', None)))Python version: 3.14.4 | packaged by conda-forge | (main, Apr 8 2026, 02:33:53) [Clang 20.1.8 ]
numpy==2.4.3
scipy==1.17.1
sympy==1.14.0
matplotlib==3.10.8