t_plot = np.linspace(0, 5, 400)
fig, axes = plt.subplots(1, 3, figsize=(12, 4))
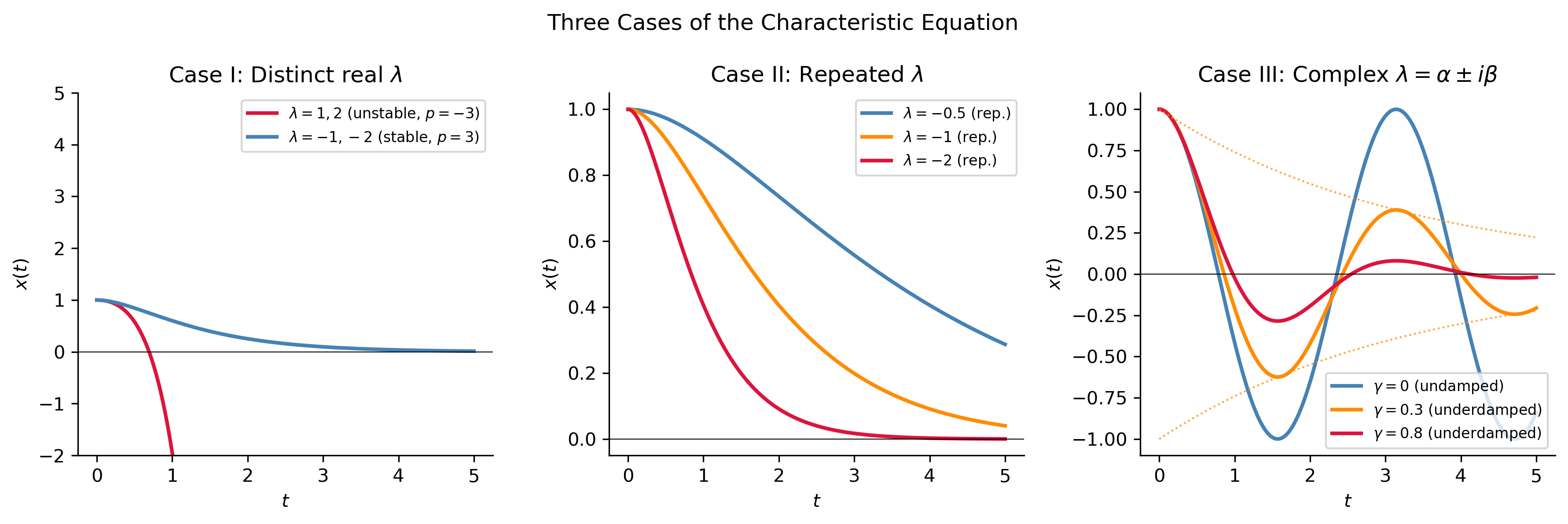
# ── Case I: Distinct real eigenvalues ───────────────────────
# x'' - 3x' + 2x = 0, lambda = 1, 2; x(0)=1, x'(0)=0
# x(0) = C1 + C2 = 1; x'(0) = C1 + 2*C2 = 0 => C2=-1, C1=2
C1, C2 = 2.0, -1.0
x_case1 = C1*np.exp(t_plot) + C2*np.exp(2*t_plot)
# Also show a stable case: x'' + 3x' + 2x = 0, lambda=-1,-2
# x(0)=1, x'(0)=0: C1+C2=1, -C1-2*C2=0 => C2=-1, C1=2... wait
# -C1-2*C2=0 => C1=-2C2; C1+C2=1 => -2C2+C2=1 => C2=-1, C1=2
C1s, C2s = 2.0, -1.0
x_stable = C1s*np.exp(-t_plot) + C2s*np.exp(-2*t_plot)
axes[0].plot(t_plot, x_case1, color='crimson', lw=2, label=r'$\lambda=1,2$ (unstable, $p=-3$)')
axes[0].plot(t_plot, x_stable, color='steelblue', lw=2, label=r'$\lambda=-1,-2$ (stable, $p=3$)')
axes[0].axhline(0, color='k', lw=0.5)
axes[0].set_xlabel('$t$'); axes[0].set_ylabel('$x(t)$')
axes[0].set_title('Case I: Distinct real $\lambda$')
axes[0].legend(fontsize=8); axes[0].set_ylim(-2, 5)
# ── Case II: Repeated eigenvalue ────────────────────────────
# x'' + 2*gamma*x' + gamma^2*x = 0 for various gamma
for gamma_val, color, lbl in zip([0.5, 1.0, 2.0],
['steelblue','darkorange','crimson'],
[r'$\lambda=-0.5$ (rep.)',r'$\lambda=-1$ (rep.)',r'$\lambda=-2$ (rep.)']):
# x(0)=1, x'(0)=0: C1=1, C2*lambda + C1*lambda*0 => diff and apply
# x=(C1+C2t)e^(lambda*t); x(0)=C1=1; x'=(C2+lambda(C1+C2t))e^lambda*t
# x'(0)=C2+lambda*C1=0 => C2=-lambda=gamma_val
C1r, C2r = 1.0, gamma_val
x_rep = (C1r + C2r*t_plot)*np.exp(-gamma_val*t_plot)
axes[1].plot(t_plot, x_rep, color=color, lw=2, label=lbl)
axes[1].axhline(0, color='k', lw=0.5)
axes[1].set_xlabel('$t$'); axes[1].set_ylabel('$x(t)$')
axes[1].set_title('Case II: Repeated $\lambda$')
axes[1].legend(fontsize=8)
# ── Case III: Complex eigenvalues ───────────────────────────
# x'' + 2*gamma*x' + (gamma^2+beta^2)x=0; beta=2
beta = 2.0
for gamma_val, color, lbl in zip([0.0, 0.3, 0.8],
['steelblue','darkorange','crimson'],
['$\\gamma=0$ (undamped)','$\\gamma=0.3$ (underdamped)','$\\gamma=0.8$ (underdamped)']):
# x(0)=1, x'(0)=0: C1=1, alpha*C1 + beta*C2=0 => C2=gamma/beta
C1c = 1.0
C2c = gamma_val / beta
x_complex = np.exp(-gamma_val*t_plot)*(C1c*np.cos(beta*t_plot) + C2c*np.sin(beta*t_plot))
axes[2].plot(t_plot, x_complex, color=color, lw=2, label=lbl)
# Envelope
axes[2].plot(t_plot, np.exp(-0.3*t_plot), color='darkorange', lw=1, ls=':', alpha=0.8)
axes[2].plot(t_plot, -np.exp(-0.3*t_plot), color='darkorange', lw=1, ls=':', alpha=0.8)
axes[2].axhline(0, color='k', lw=0.5)
axes[2].set_xlabel('$t$'); axes[2].set_ylabel('$x(t)$')
axes[2].set_title('Case III: Complex $\\lambda = \\alpha\\pm i\\beta$')
axes[2].legend(fontsize=8)
plt.suptitle('Three Cases of the Characteristic Equation', fontsize=12)
plt.tight_layout()
plt.show()